Asteroid LandersRussian Phobos probesThe Russians sent two missions to Mars' asteroidal moon Phobos in the 1980s with microgravity robot landers, and another in 2011. All failed enroute, so that the lander technology was never tested. However, the designs are still interesting. They were designed to move around the surface of Phobos by hopping, without any fuel propellant, just rotating legs. (See papers by V.A. Simonenko and colleagues.) One probe lost communication en route to Mars, and the other lost communication at Phobos before landing. The latter is believed to have possibly suffered a fuel propellant explosion during a close-in maneuver. In 2011, the third (Fobos-Grunt) never got beyond low Earth orbit. The Japanese Hayabusa probe had a hopper but it failed to deploy. Hayabusa-2 is under construction for launch in 2012. Asteroid Surface AttachmentFor mining and a base on the surface, we need to look at means of attachment. So far, the alternatives considered by various studies for surface attachment and mobility on, in and around an asteroid are:
Penetrator attachments can be one or more of the following:
The MIT Artificial Intelligence Laboratory has developed small, low mass robots and analyzed how they could be adapted to an asteroid environment. As in the Russian designs, hopping was adopted. The final design looks like a flat insect with six legs. Included in the MIT study were momentum wheels used to aid in stability during motion over the surface, and solar panels which could be cleaned of dust ("grooming"). Close attention was paid to joints sealed from dust and thermal management. (To keep out dust, it seems to me that a balloon type of ball joint is simple enough and this should be no such drama.) It was estimated this robot could completely scope out a 2 kilometer diameter asteroid in about 125 days. In addition to hopping, the claws of the robot could be designed to give the probe the capability to operate much like a rock climber in case the asteroid has a hard surface. One option they considered is to mimic an insect's legs, which have hooks capable of latching onto surface irregularities, which is what allows insects to walk across ceilings, or latching into fairly cohesive soil. A fairly generic robot with a combination of transport capabilities would be able to adapt to different asteroids' environments as well as different environments on the same asteroid. Such a multifaceted design could result in standard asteroid robot capable of dealing with a wide range of conditions, without any need for another probe to go scope out the asteroid environment prior to sending the surface probe. Due to the low mass of asteroid robots, several robots could be sent on the same mission to an asteroid using a small rocket. Thus, it may also be feasible to send more than one kind of robot on a given scouting mission. Another group, the Space Studies Institute (SSI), the University of Southern California (USC), and the Jet Propulsion Lab (JPL), developed small robots called SKITs (Sub-Kilogram Intelligent Tele-robots) in the laboratory, of which a large group would be deployed. The mother craft would continue orbiting the asteroid and would serve as the communications relay to Earth.
"A typical scenario for this research would be to release a number of vehicles with some communication capability, and with a specialization of functions on a simulated landscape. Humans would control the overall deployment policy but the telerobots would have some autonomy to deal with obstacles…. "Our intent was to develop a research program involving actual hardware development to produce prototypes of intelligent miniature tele-robots that could later be improved, space-qualified and used in precursor missions for space resource prospecting, mining and manufacturing. In addition we focused our attention on the effective utilization of the abundant and rich untapped resources of asteroids… "Our plan was to study the relative merits of miniature size robots, with various degrees of intelligence for the initial phase of this process… The leverage these [size and weight] constraints may provide are substantial benefits in the areas of reliability, high coverage and low cost… "The primary prospecting objectives for asteroids are surface imagery and a detailed determination of their composition. These diagnostic elements should be measured with sufficient global coverage to determine the scale and extent of chemical heterogeneity. In addition, in order to get samples that are pristine, a drill or some similar tool will be needed." The study did not try to come up with one recommended probe set, but rather to come up with concrete design alternatives which a prospector could choose from, depending upon the prospector's objectives, budget and other judgement factors. Tradeoff analyses are a main part of this research. However, one concept researched in greater depth was a group of SKITs that are attached to a net which in turn is attached to the asteroid. A base is formed at one place on the net. The net serves more than one purpose:
The net can be small and anchored over one region, or it can be large and wrap around the asteroid. The net can consist of parallel and perpendicular cables - a square pattern, or it can consist of circular concentric rings. There were many kinds of SKITs conceived, and some built. The SKITs could be divided into three kinds of units:
There are obvious variations of the above three kinds of units, especially breakouts among the latter two. How specialized or modular the SKITs may be is up to the design choice of the mission planner. An impressive, complete setup of SKITs was demonstrated by the researchers in May 1997 at the Space Studies Institute's (SSI) Conference on Space Manufacturing XXIII in Princeton, New Jersey, using a base unit and several SKITs, each robot being a little smaller than an average coffee cup, as pictured here. 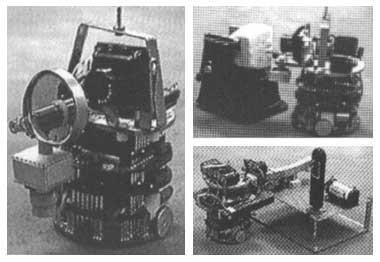
Pictures of SKITs, and a Mobile Helper at a Base Station (bottom right) The NASA Johnson Space Center (JSC) developed a flight instrument for probes to measure volatiles in samples of regolith "[f]or bodies such as the Moon or asteroids". It consists of a small programmable furnace which can measure volatiles released at different temperatures, a supply of reactant gas, and a quadrupole trap mass spectrometer. It is a small instrument, called REGA.
Technical parameters:
"During 1994-95 we accomplished the following:
"During 1996 we are conducting verification and calibration tests on the furnace and gas distribution systems. We will integrate these two systems with a quadruple mass spectrometer to be provided by University of Texas at Dallas. This instrument is modified from the mass spectrometer which flew on the Shuttle Wake Shield Facility during the summer of 1995. We will then perform a series of tests to determine the background, sensitivity, and performance of the integrated REGA.
The mockup is designed to contain and insulate the full suite of REGA components and instrumentation. Dimensions are 15cm x 20cm x 27cm (5.9" x 7.9" x 10.6") "Future work will build on the results of these tests. We will define the instrument's control, data and communication requirements and commence design of this system. We will fabricate an integrated prototype with its control and data system and conduct verification testing in a vacuum chamber. To complete this project we intend to bring REGA to a flight-ready status." This is obviously an outdated web page, but is slated for an update in 2012. There is additional work pending a write-up on this page. SpaceSettlement.com > Asteroids, Near Earth Objects (NEO) > Asteroid Lander Techniques
|
This website has a lot of text content, so here are some suggestions on how to navigate and also recognize pages you're seen already vs. still unseen pages in the SiteMap.
The pulldown menu and the SiteMap are the same tree of pages and links. The pulldown menu offers + and - for expand and collapse sections/subsections/sub-subsections... of the tree, sometimes multiple levels, whereas the SiteMap has everything expanded with no + or - expand and collapse options so the SiteMap is much longer, compared to the pulldown menu (if the pulldown menu is not fully expanded). You may just choose which of the two formats you prefer at a particular time.
|
|||||