|
§ 3.4.3 Lunar Launch by Mass Driver "Slingshot" The "mass driver" is a "catapult" tube which launches materials from the lunar surface to a Catcher/Collector, perhaps near a factory in orbit near the Moon. The mass driver is like a gun without the explosive gunpowder. It is powered by electricity, producing magnetic fields to accelerate cargoes through an accelerator tube. No fuel propellant is required for lunar launch, and there's no big vehicle to launch. The mass driver shoots a large number of small payloads, continuously, rather than an occasional large payload. 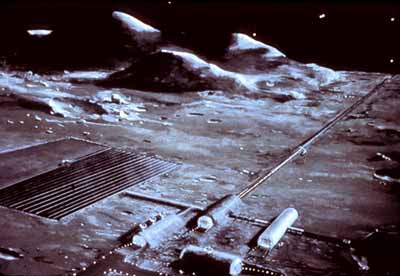
Mass driver on the Moon. Source: SSI (www.ssi.org) The mass driver will eventually become the main means of supplying material from the Moon to industry in orbital space, though not in the early years of space development. It can help preserve the lunar environment by reducing the creation of a tenuous atmosphere from rocket fuel propellants, and it saves on the consumption and costs of producing fuel propellant. It can be argued that the mass driver can ship materials in much larger volumes than is feasible by chemical rocketry, and at lower costs per unit mass. The "mass driver" has been a popular lunar launch concept, largely due to promotion, research and development by the Space Studies Institute (SSI). A laboratory prototype of the accelerator section has been built and tested successfully by SSI. Powered only by electricity, it is a solar powered launcher using the principle of electromagnetism to magenically accelerate a payload equipped with a magnetic bucket to excape velocity. It has been argued that the mass driver is a relatively inexpensive and automated device to create a stream of material at the rate of up to a few small packages per second, depending upon design. Total amount of material deliverable each month could dwarf any feasible lunar or Earth launch capacity by rocketry, in terms of tonnage of payload launched. As it is covered most prevalently in the literature to date, minerals mined and processed are packaged in a thin glass/fiberglass bag easily manufactured using lunar materials. The bag is made to conform to the shape of the bucket so that the bucket assumes the stresses during acceleration, whereas the package contains the minerals after acceleration and snapout from the bucket. By the time the payloads climb up out of the Moon's gravity well, they have lost most of their velocity and are travelling slowly. At this point, the orbital-based catcher collects them. The payload material's momentum carries it through the funnel-shaped catcher into a collector bag. After the bag fills up, it is detached from the funnel and is replaced by an empty bag. The mass driver accelerator tube would be less than 200 meters (600 feet) long and probably about half a meter wide, though downrange trajectory correction equipment will probably be worth the cost. The mass driver would fit into only one Shuttle cargo bay, disassembled, not including power plant, material handling apparatus, and fuel for delivery. The electric power plant size determines the launch RATE, not ability -- a small rate initially, increasing permanently with more power modules and support apparatus. Unfortunately, the mass driver is feasible to operate only on the Moon, because it needs vacuum. A mass driver operating on Earth would cause meteoric friction heat to such hypervelocity payloads and great physical stresses, at the dense bottom of Earth's atmosphere (ocean of air) as they left the catapult tunnel. Secondly, the air would aerodynamically deflect such objects in unpredictable ways which would disperse their trajectories. Thirdly, an operable mass driver on Earth would require a long vacuum tunnel (much longer than on the Moon, since the escape velocity is higher). Fourth, the air would create hypersonic sonic boom shockwaves that would be loud for a long distance. Fifth, individual payloads would have to be massive enough to punch through the atmosphere in an acceptable way. Such massive payloads demand alot of the catapulter as well as the orbital based catcher/collector. In contrast, the Moon has no air and low gravity. The orbital-based Catcher/Collector would be located in lunar-stationary orbit (the "L-2" or "L1" point), where it would collect the stream of numerous small payloads after they slowed down in climbing up in the Moon's gravity well. Various catcher/collector designs exist. Pollution of space should be avoided, so the containment of material is important. If a package misses the catcher, it should return to crash on the Moon, not orbit Earth. This must be built into the trajectory design. A number of bottom-line facts about the mass driver for space transportation :
The mass driver, as you can see, is an entirely different kind of launching device. With the advent of space-based industry and the demand for products and materials, the small step of basing a mass driver on the Moon will be a giant leap for the eventual low cost transportation of material to space, and will make the Moon more competitive as a source of materials compared to asteroids. However, it is my opinion that the mass driver will not be used until large scale space infrastructure has been established. It is my opinion that a successful, privately funded investment into lunar materials would need a strong case for the reliability of the mass driver before it would use or invest in development of a mass driver over chemical rocketry. If the mass driver in its popular implementation -- pull-only with no magnetic levitation guide strips -- were put on the Moon and something went wrong with the launch so that the bucket coil scraped along the wall of the tunnel at anything near its terminal velocity (2.4 km/sec), the mass driver could sustain major damage, delaying delivery of material for a significant time unless there were good repair infrastructure already emplaced. This is a risk issue for private investors. Before the mass driver is developed further, a good, peer reviewed case must be made for its reliability. Notably, a safer, more robust design may be more attractive, e.g., using magnetic levitation guide strips, even it it's significantly less efficient and more expensive. In comparison, chemical rocketry has its risks in terms of rocket engine failure. Regarding the latter, rockets for launching off the Moon are significantly safer than rockets launching off of Earth because the Moon's gravity is much less. The lower gravity has a compounding effect: rockets on Earth have far more fuel than payload (e.g., 50 times more fuel weight than payload) -- fuel for later in the flight -- which means the Earth rocket must launch a much heavier mass than its payload. The rocket engines on the Moon need not be the very high performance ones as on Earth, and the stresses are much less. Work to date has emphasized the mass driver acceleration coils, in order to reduce the size of the acceleration section to, say, 160 meters. No laboratory work has been performed yet on any other element, e.g., assuring the precision required to hit the Mass Catcher in orbit, though many paper studies have been performed. Notably, many designs call for the buckets to be recycled, which would reduce the cost of manufacturing bucket coils for every payload or returning bucket coils from orbit to the Moon, e.g., by chemical rocketry. If this approach was adopted, the bucket coils would need to be recycled, which gets into the very risky business of diverting high speed objects into a deceleration tunnel in a precise way, and decelerating them properly. One alternative is to launch large payloads so that manufacturing or returning bucket coils becomes economically feasible, which goes counter to many designs of mass driver to launch small payloads and keep the launch tube short and lightweight. I've not seen a good analysis of potential failure modes or remedial actions. In the long term, a mass driver is preferable in order to preserve the Moon's environment. The Moon has sufficient gravity to retain an atmosphere, and chemical rocketry launches could create a significant atmosphere which would take many years to dissipate if we were to later cut back dramatically on rocket operations on the Moon. Explanations of the mass driver as developed by SSI are on the following pages. However it's worth noting that I have worked on electromagnetic launchers for the Pentagon in the Star Wars/SDI program (largely reviewing and assessing the different concepts for SDIO decisionmakers), and there are a few interesting alternatives to the prevalent "coaxial" mass driver developed by SSI. How the mass driver works The mass driver works by the magnetic attraction between electromagnets. One electromagnet is the bucket coil, and the other electromagnets are the drive coils. What is an electromagnet ? Electric current in a coil of wire always produces a magnetic field, called an electromagnet, which behaves basically just like a bar magnet, except for the fact that an electromagnet can be made to be stronger than a bar magnet by increasing the electric current through the coil. By proper orientation of the poles, a bar magnet and an electromagnet can be made to attract or repel each other. Similarly, two electromagnets can be made to attract or repel each other and hence accelerate towards or away from each other. Which side of an electromagnet is the north pole depends on whether the electric current is clockwise or counterclockwise through the coil of wire. The mass driver works by two electromagnets being attracted to each other and hence causing acceleration. One coil is smaller than the other, and passes through the center of the larger coil. The larger coil is the "drive coil", anchored down to be stationary, and the smaller coil is the accelerated "bucket coil". The mass driver is a tunnel of numerous drive coils accelerating a bucket coil. The bucket coil pulls a bucket of material with it. The drive coils are not always turned on. Each drive coil must turn off its electric current when the bucket passes through its center in order not to slow the bucket coil back down on the other side by the same attractive force. Secondly, each drive coil turns on only when the bucket coil is close enough to feel the pull significantly (in order to save power), and turns off when the bucket coil reaches about the center of the drive coil. Thus, each drive coil gets only a pulse of current, when the bucket coil is closely in front of it, and must be off when the bucket coil is behind it. The bucket coil always has current. What the bucket coil "sees" as it travels down the tunnel of drive coils is a series of dead drive coils each of which suddenly turns on quickly when the bucket is very close, and then turns back off by the time the bucket coil passes through the exact center of the drive coil. This happens for each drive coil in sequence as the bucket flies down the tunnel of drive coils, picking up more and more speed. This version of "coaxial" mass driver is called a "pull-only" mass driver, because the bucket is pulled by magnetic attraction but is not pushed by magnetic repulsion. Other versions exist, such as pull-push, which we won't consider here. With the pull-only mass driver, no mechanical guidance means is needed to keep the bucket from crashing into a drive coil because the pull-only magnetic field of the drive coils strongly forces the bucket to levitate along the center of the drive coil tunnel. The drive coils are side by side; in fact, and the next can turn on before the previous one turns off. The technical details of the mass driver won't be discussed in this nontechnical brief (e.g., drive coil kilohertz halfwave power pulsation, capacitors, bucket current induction, etc.). Suffice it to note that a prototype mass driver accelerator tube was built and tested successfully by the Space Studies Institute of Princeton, N.J., with lunar duty as its objective, and produced an acceleration 1,800 times Earth's gravitational aceleration. A lunar-based mass driver accelerator can be built using present-day off-the-shelf technology, but other parts of the mass driver need to be developed. Next, an overall view of the mass driver on the Moon will be given. Operating the mass driver on the Moon After lunar soil is excavated, transported, refined using simple conventional means, packaged, weighed, and made to be of precise weight (e.g., added molten glass weights). The packages are loaded into buckets with bucket coils. The buckets are emplaced in a special device in front of the first drive coil, and current is induced in the bucket coil. The drive coils are fired in sequence, with the aid of "electronic eye" sensors to trigger the drive coils and monitor the location of the bucket for adjustment in timing if necessary. The drive coils induce further current in the bucket coil. After the bucket leaves the accelerator section, it is travelling at lunar escape velocity. Even though the mass driver is horizontal, the bucket and payload would not fall to the ground because of its high speed and the Moon's curvature and low gravity. Immediately after the acceleration tunnel is a payload snapout and bucket diversion section, where the bucket is magnetically decelerated to separate it from the payload (which isn't decelerated and hence leaves the bucket behind) and to make the decelerated bucket fall downwards in the lunar gravity to a lower tunnel track to get out of the way of payloads coming behind it. Magnetic levitation guide strips will be required here. The bucket is then decelerated magnetically on the lower track and returned on a parallel track to be reloaded with another payload. The mass driver's deceleration section converts the bucket's momentum back into electrical energy as it slows it down, by "regenerative braking", using the same fundamental principle as electric generators. In fact, the decelerator is a generator while the accelerator is a motor (a linear motor instead of a rotational motor). By getting electrical energy back out of the bucket's momentum, the overall efficiency of the mass driver remains between 70% and 90%, depending on the details of the design. In the deceleration section, the bucket requires magnetic guide means to prevent it from striking a drive coil. The well known principle of magnetic flight (i.e., passive magnetic levitational guide strips) would prevent any mechanical rubbing. Very important is the need for payloads leaving the mass driver to have precisely the same velocity so that they all go to the same place in orbit and so that the catcher/collector can be of reasonable size. Very small variations in speed or significant lateral velocity can make payloads miss the catcher/collector. Thus, it is desirable to have a way of correcting trajectories after payload snapout from the bucket. Downrange trajectory correction stations are possible for a horizontal mass driver. Several methods have been proposed for both trajectory determination and correction. Trajectory determination can be done by radar or laser ranging. Trajectory correction may be achieved by electrostatic means, or puffs of air, or by striking the side, front, and/or back of the payload with a low power laser or particle beam to boil off a thin layer of the payload's outer skin to create an action-reaction impulse sufficient to prevent the payload from missing the catcher/collector in orbit. It's important for the mass driver to maintain consistency so that payloads all go to the same point. It may not be necessary to predict that precise point in advance and then try to adjust the mass driver, but it is important that the mass driver be consistent wherever it may be firing payloads. Once the mass driver starts shooting payloads, it may be necessary to move the catcher to adjust for design imperfections in the mass driver. In other words, instead of putting the catcher at the ideal point and then working to make the mass driver shoot that point, we would just shoot the mass driver and then move the catcher to where the stream of payloads is going. Further, as the sun slowly moved relative to the Earth and Moon, the stream of payloads would also slowly shift, requiring the Mass Catcher to follow the stream. Thus, what is most important is that the mass driver be consistent in producing a narrow stream. The catcher could be located at the so-called "L-2 point" or "L-1 point in orbit, as discussed in the section on Lagrangian libration points. In short, the L-1 and L-2 points in orbit are stationary relative to the Moon's surface so that the mass driver is always shooting at the same point. The L-2 point acts kind of like the top of a gravitational hill that isn't very steep, so that one doesn't have to be stationed at the absolute balance point on top to be sufficiently stable for economical stationkeeping. The propellant needed for station-keeping and maneuvering would not be very large. The payloads would arrive at about 70 meters per second, so they push the catcher around a bit. For example, it has been proposed that a stationkeeping device shooting slag pellets out at a velocity 30 times the incoming payload velocity (i.e., 2100 meters per second) would theoretically be able to compensate entirely for this momentum transfer at a 1 to 30 ratio of propellant to payload. As for polluting space with propellant pellets, the ejection speed of 2000 meters per second easily escapes the Earth-Moon system, and does not add significantly to the quantity of rocks naturally populating space. Of course, slag pellet shooters aren't our only option, and gaseous propellants are much more efficient since they have much higher exhaust velocities. It has also been proposed that the catcher be stationed in a lunar-synchronous position whereby it would fall down towards the Moon except for the throughst produced by the incoming packages impacting it. For technical information on the mass driver in particular, one may wish to contact the builders of the laboratory prototype lunar mass driver, The Space Studies Inst., P.O. Box 82, Princeton, N.J., 08540, (609) 921-0377, ssi@ssi.org and http://www.ssi.org
(The founder of PERMANENT, Mark Prado, did research on electromagnetic launchers as part of the "Star Wars"/SDI program, and also on mass driver power conditioning systems. As a humorous aside, in my office I had a miniature mass driver quickly made from cheap parts, charged by a regular batttery, and sized to shoot caps from coke bottles. When friendly associates would enter my office, I'd shoot a bottle cap at them.)
SpaceSettlement.com > Transportation > Midterm > Mass Drivers
|
This website has a lot of text content, so here are some suggestions on how to navigate and also recognize pages you're seen already vs. still unseen pages in the SiteMap.
The pulldown menu and the SiteMap are the same tree of pages and links. The pulldown menu offers + and - for expand and collapse sections/subsections/sub-subsections... of the tree, sometimes multiple levels, whereas the SiteMap has everything expanded with no + or - expand and collapse options so the SiteMap is much longer, compared to the pulldown menu (if the pulldown menu is not fully expanded). You may just choose which of the two formats you prefer at a particular time.
|
|||||